课题组长姓名: 姜宛辰助理教授 研究员 博士生导师, PhD, 助理教授
职务: 所在院所: 生命科学与技术学院
荣誉称号: 教育经历:
博士后及工作经历:
课题组简介 研究方向:
神经生物学
研究内容:
研究方向:动物灵活行为的神经环路及其编码机制 研究内容: 为了应对复杂多变的环境,动物在与外部环境交互过程中的认知和行为策略必须非常灵活,以保障自身的生存。认知和行为灵活性使得动物能将已获得的经验知识迅速泛化应用到新的场景,从而实现从少量的观测中进行快速学习推理。认知和行为灵活性目前仍是生物智能所擅长,但人工智能仍十分欠缺的一种能力。 本研究组致力于从神经元活动、环路、动物行为以及理论模型等多维度上系统地研究认知和行为灵活性的神经机制。实验室将综合运用系统与理论神经生物学以及强化学习等方面的前沿方法(如,动物复杂行为任务、活动小鼠的神经钙成像、在体多通道电极记录、光/化学遗传学、强化学习等)解析认知和行为灵活性的神经基础。 具体研究项目: (1)海马体和皮层中研究认知地图的形成、动态更新及泛化的编码机制。 (2)动物的社会行为灵活性的神经机制。 研究成果展示长期致力于开发多种前沿神经科学技术,并运用这些新技术,从神经元反应活动、神经环路联接、动物行为及理论建模等多个视角,全面系统地解析灵活行为的神经机制,揭示灵活行为是如何在神经网络的相互作用中涌现出来的。
场景依赖的认知地图的神经表征 在复杂多变的野外条件中,动物既需要利用空间导航信息也需要利用与空间导航无关的关联信息去学习环境中的路径等结构特征,以便获得食物和水等奖励。 海马神经元的同步再激活在回忆和评估学习环境路径的过程中发挥着至关重要的作用。海马神经元活动是否在空间导航和非空间导航两种场景中存在着不同的神经表征?为回答此问题,我们开发了2种在空间导航信息上正交的行为任务:空间目标觅食和非空间导航的觅食行为。运用微型荧光显微镜钙成像和光遗传学操作,我们发现海马CA1神经元的同步再激活在空间导航场景中是回顾性的,对于评估先前的导航轨迹很重要;在非空间导航场景中,神经元的同步再激活对于运动轨迹的启动具有前瞻性和重要意义。此外,基于强化学习的理论框架,我们建立了一种能很好地定量描述上述2种行为任务的通用算法。在该算法中,海马神经元活动能根据所处场景对强化学习做出不同贡献(Nature Neuroscience, 2022)。
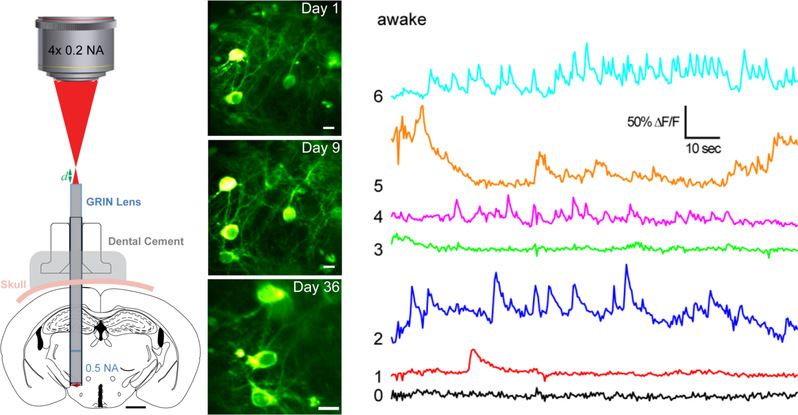
具有亚细胞分辨率的深部脑区钙成像技术 对哺乳动物大脑中任意位置的神经元进行成像是光学显微镜的重要目标之一。 为此,我们开发了一种微创显微内窥镜系统,用于研究位于深部脑区的神经元的形态和功能。利用该技术,我们首次实现了在头部固定的清醒小鼠的外侧下丘脑和黑质中亚细胞分辨率的神经元活动的动态观测。 代表性论文(*第一作者,#通讯作者)
专著专利项目奖励加入我们课题组成员及合影
|